タイトルの通り、PFLabフォーラムに行ってきた。
今日は東大で登壇します!
— ちょまど@devサミベストスピーカー受賞 (@chomado) 2017年3月28日
ハッシュタグは #PFLab だって!
ーー
【第1回PFLabフォーラム】自動運転からスパコン×Deep Learning、メニーコア×OS、ゲームAI、Xamarinまで豪華な内容盛り沢山! https://t.co/xPVApbz9LC
今日の小柴ホールは #PFLab
— よだ (@n__yoda) 2017年3月28日
私は新宿税務署でアルバイトをしていて13:00まで新宿に拘束されていたので、加藤真平准教授による自動運転とベンチャー起業のお話は聞けなかった。
「自動運転とベンチャー起業」
— κeen (@blackenedgold) 2017年3月28日
「学生の卒研発表」
「それだけだと盛り上がりに欠けるのでゲスト講演」
#pflab
盛り上がりに欠けるというだけで呼ばれるちょまどさんと三宅さんぇ・・・
高精度3次元マッピング
自動操縦に必要なもの
- 周辺地図の構築
- 自分の位置の推定(localization)
- 行動計画
- Act!
三次元地図
→点群
すでに持っている3次元点群と新たに得た点群を重ね合わせる
レーザレンジファインダによって点群からなる地図を作成(三次元地図) #pflab
— むさしん (@musaprg) 2017年3月28日
How?
- ICP
すべての点群について計算→重い - NDT
ボクセル(点群の小規模な部分集合)同士の位置合わせ(平均(傾向)・分散共分散行列(ばらつき))
ボクセル https://t.co/oDcP1CQdwr #PFLab
— むさしん (@musaprg) 2017年3月28日
やったこと
NDTの研究
インクリメンタルな地図登録
全部のボクセルを再計算する必要はないよね
従来のNDT : O(n):地図の点群数∝地図登録時間
インクリメンタルなNDT: O(1): 地図登録時間は一定
点一つ一つじゃなくてあるていどまとめて処理するの、天体シミュレーションの手法でもあったなぁ#pflab
— sksat@山行終わり (@sksat_tty) 2017年3月28日
不均一なボクセルの更新
ボクセル内の点群がある程度貯まると、それ以上増えても平均・共分散に影響が少なくなる
→それ計算しなくてもいいよ!
→更新破棄
1msec程度の削減しかできなかった
分岐挿入で性能が改善しなかった? #pflab
— もっちぃ (@tanimocchi) 2017年3月28日
メモリーキャッシュが壊れそうなアルゴリズムだからまああんま早くならないだろうなぁ。
展望
- 地図構築をGPUで
- ボクセルの大きさは不均一でもいい? # なんかNext HEVCみたい
- ドローンで地図作ろう
ボクセルの大きさは不均一でもいいというのは、
rigayaの日記兼メモ帳 技研公開 2016
NHK技研でHEVC(今もっともよく使われているh.264の次世代のh.265のこと)の次世代コーデック開発で、
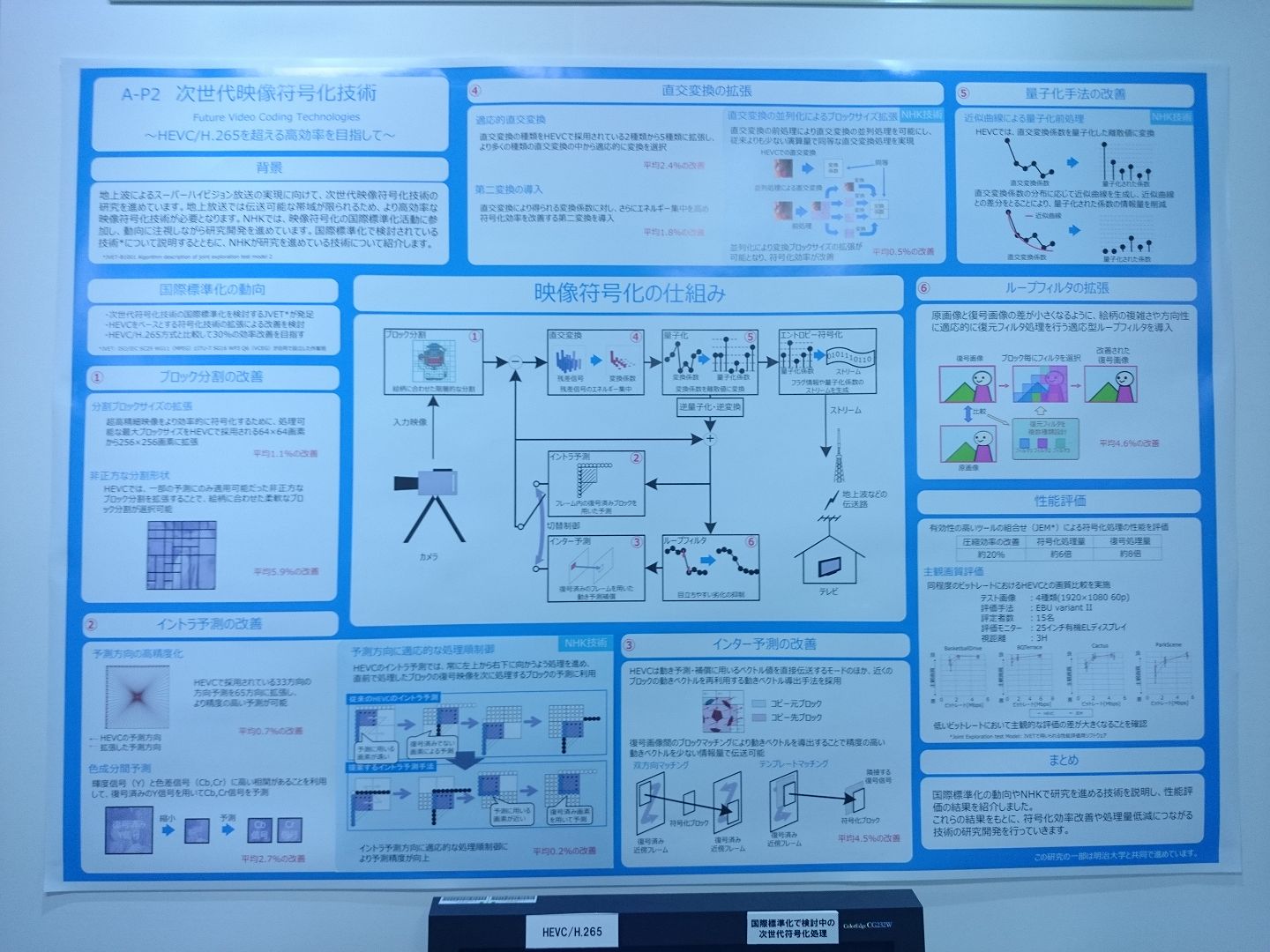
圧縮の際の分割ブロック制御で似た話があったなぁ。
自動運転データストリーム
「自動運転データストリーム」? #PFLab
— NaOHaq(仮性ソーダ) (@NaOHaq) 2017年3月28日
うん、私も???ってなりながら聞いてた。最後の方になってなんとなくわかったけど。
LiDARデータ: 360度回転画像を1frame
自己位置推定に使われる
→点群に変換
- 地図とマッチング
- 地図生成
- etc
LiDARからRGB画像から抽出した物体までの距離を算出
Bagデータとして(生データ)収集
「rosbag」ROSが提供しているデータ格納ツールを用いて時系列順センサデータを独立に格納 #pflab
— むさしん (@musaprg) 2017年3月28日
ーDeep Larningに流し込みにくい
変換ツールが必要やろ!
というか発表後?に「オープンソースにする」とか聞こえた気がしたけど超高速て次の発表はじまったので、結局どこで公開しているのだろうという思い https://t.co/9SmklHfC3q
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
- 撮影画像
- Depth可視化画像
動画+LiDARでブレーキ予測できるか実験
Deep Larning
並列化された畳み込みニューラルネットワークのスケーラビリティに関する研究
→ # とは
ニューラルネットワークの大規模化
- ResNet: 152層
Fully CNN 絡みか? < 早大グループの研究成果 #PFLab
— NaOHaq(仮性ソーダ) (@NaOHaq) 2017年3月28日
CNN: 畳み込みニューラルネットワーク
パターン認識に特化
ちょっとこの辺は知識不足なので
定番のConvolutional Neural Networkをゼロから理解する - DeepAge https://t.co/40ImwohIPE #pflab
— Masaki Waga (@MasWag) 2017年3月28日
この辺をあとで読もうを思っている。
→並列化したらうまく動くの? # GPUのほうが並列しているのは?
複数データの同時学習
- Lowering Convlolution
- 複数CPUでの学習
HTTとOpenMPとMPI
「Pipelined Lowering」処理を細分化、Loweringと行列席を1コア内で同時実行しリソース利用の効率化を実現 #PFLab
— むさしん (@musaprg) 2017年3月28日
OpenMP(マルチスレッド化)、MPI(マルチノード化) #PFLab
— むさしん (@musaprg) 2017年3月28日
c.f. ChainerMN による分散深層学習の性能について | Preferred Research https://t.co/jf9SNdoAtK #PFLab
— NaOHaq(仮性ソーダ) (@NaOHaq) 2017年3月28日
畳み込み層→重い
出力pixelごとに内積計算するから重い
→ Lowering Convlolution
→ 行列化→それは早い→行列生成がメモリーネック・浮動小数点演算→辛い
pipelined Lowering
細分化
特定の条件下でLowering < Pipelined
Lowering: 6倍
pipelined Lowering: +10% boost
マルチノード化で64並列で46倍
メニーコア
大体のCPUはせいぜい4Core
せいぜいみんなCoreは4つでしょ?Intel Xeon Phiなら>64 Core/ 256 threadやで
オンチップメモリの帯域も大きいんだ #pflab
— κeen (@blackenedgold) 2017年3月28日
2g: 2次元メッシュアーキテクチャ
タイル→正方形状にネットワークにつながっている
タイル同士が通信
「Shared Memory型のマルチコアプロセッサ」とはパラダイムが違う、というのがより正確だろうか #PFLab
— NaOHaq(仮性ソーダ) (@NaOHaq) 2017年3月28日
1タイル内ではL2キャッシュを共有。タイル同士が2次元連結 #pflab
— κeen (@blackenedgold) 2017年3月28日
OSの性能によってアプリケーションの性能が左右される #PFLab
— むさしん (@musaprg) 2017年3月28日
まあ確かにタイル感が通信できれば、依存が広い画像処理とかは早くなるよね、メモリーが共有がじゃないから #pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
「メニーコアをアプリケーションが最大限使うにはOSがちゃんと調停してあげる必要がある。新しいOSが必要」 #pflab
— κeen (@blackenedgold) 2017年3月28日
でも既存のOSじゃだめやろ!
→よろしいならばフルスクラッチだ
まあメモリー管理はOSがやるべき仕事だからわかる。
— NaOHaq(仮性ソーダ) (@NaOHaq) 2017年3月28日github.com github.com
スピンロック
並列化するとどんどん遅くなる
→改善アルゴリズム(TTC, HCLH, etc…)多数→検証中
具体的には?
タイル内のロックは低コスト→どんどん使う
「タイル内でのロックとタイル間でのロックの速度の違いに着目」
— κeen (@blackenedgold) 2017年3月28日
「階層ロックと呼ばれるアルゴリズムを使った」
「25%高速化に成功」
#pflab
Knights Landing向けのOSをフルスクラッチで実装、楽しそう。 #PFLab
— shunsuke_sasaki (@shunsuke_sasaki) 2017年3月28日
展望
高速計算以外でも使わないとアーキテクチャが死ぬ
- 広帯域IO
- 低消費電力
なんか @chomado さんが発表を聞いて混乱してわちゃわちゃ!ってなっている#pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
人工知能が拓くゲームの未来 - FINAL FANTASY XV が見せる人工知能の世界 -
なにこのPVかっこいい #PFLab
— むさしん (@musaprg) 2017年3月28日
自走運転のPVが休憩時間に流れてるんだけど、無駄にかっこよくて笑う #pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
ゲームAI
→人工知能学会誌読もう
人工知能学会誌2017年2号にも同じ内容の記事あり #PFLab
— むさしん (@musaprg) 2017年3月28日
FINAL FANTASY XV
仲間、自然、モンスターがAIで動く
- ルールベースのAI
- プレイーやーの意思を読むAI
- 自分の体の認識
現代は知能革命の時代に入りつつある
かつてはAIはゲームシステム内にあった
現代:
- メタAI(予定調和)
- キャラクターAI
- ナビゲーションAI
が協調
敵が増えるとプレイヤーは死ぬわけですが
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
そうじゃなくてメタAIでストーリ性を付加する
#pflab
AI量産のために
Luminous AI アーキテクチャを作った→アカデミックと違う
Luminous AIという独自のAIツールを開発 #PFLab
— むさしん (@musaprg) 2017年3月28日
- Luminous AI Graph
- Luminous Navigation
「エンジニアは作らないポリシー。ツールを作ってゲームデザイナに作ってもらう」 #pflab
— κeen (@blackenedgold) 2017年3月28日
ツール職人とデザイナーの分業の話 #PFLab
— NaOHaq(仮性ソーダ) (@NaOHaq) 2017年3月28日
単一の意思決定は十分でない
複数の意思決定を組み合わせる
→ロボットに適用
メタAI
体がない
映画監督
仲間同士で強調して動作したい
プレイヤーが寂しくないように
ex.) - プレイヤーや仲間のピンチを助けよ
「シューティングゲームのキャラクターの動きを記述するオブジェクト指向スクリプト言語」を作ったとき、ステージ(シーン)の進行を制御するのは別の枠組みが必要だと認識したのを思い出す < メタAI #PFLab
— NaOHaq(仮性ソーダ) (@NaOHaq) 2017年3月28日
キャラクターAI
- 知能(AI graph)
- 身体(ボディ・レイヤー)
- アニメーション(AnimGraph)
の3つ
AnimGraphというツールでnode(それぞれモーション)を繋いでモーションのブレンド
これツール単体で相当の価値あるよな… #PFLab
— むさしん (@musaprg) 2017年3月28日
知能:身体と環境の間に入って調和を保つ役割 #PFLab
— むさしん (@musaprg) 2017年3月28日
エージェント・アーキテクチャ:知能と環境を分けて考える #PFLab
— むさしん (@musaprg) 2017年3月28日
環境世界 –{センサー・体}–> 知能世界(思考(認識の形成、意思決定、運動の構成)と記憶) –{エフェクト・体}–> 環境世界
- 有限ステートマシン
階層型ステートマシン
ステートマシーン
- behavior tree
→いいとこ取りしたい
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
ビヘイビアツリー。何をする?→撤退→手段は?→足止めをする→選択肢は?→トラップ#pflab
— κeen (@blackenedgold) 2017年3月28日
ハイブリッド型ノードフォーマット
段々recursive hybrid automatonみたいな話になってきた #PFlab
— Masaki Waga (@MasWag) 2017年3月28日
ビヘイビアツリーとステートマシンを再帰的に入れ子に出来るみたいな…? #pflab
— よだ (@n__yoda) 2017年3月28日
www.slideshare.net論文「ディジタルゲームにおける人工知能技術の応用の現在」https://t.co/QIGRlaEVO7
— もっちぃ (@tanimocchi) 2017年3月28日
類似スライドは、この辺りかしら?https://t.co/rrG1Ls8Ok5#pflab
ステートマシーンのnodeがbehavior tree
逆も然り
Nodeの共有
→組合せ爆発を防ぐ
AIの思考を表現したグラフのどこがActivateされているかわかるようになってるゲームAIのデバッガ、よく出来てるなぁ。 #PFLab
— shunsuke_sasaki (@shunsuke_sasaki) 2017年3月28日
ナビゲーションAI
- 地形を解析
- 目的におおじた点を見つけ出す
目的地までのパスをを計算する
- ダイクストラ法(同心円探索)
- A*(スター)法(指向性探索) → 99%こっち
ナビゲーションメッシュ 地形の情報に合わせて歩ける部分のみ表示
スマートウェイポイント
「スマート・ウェイポイント」小さいデータを使うことで詳細なナビゲーションも可能に #PFLab
— むさしん (@musaprg) 2017年3月28日
ウェイポイントを使って人の流れを整理 #pflab
— κeen (@blackenedgold) 2017年3月28日
3次元パス検索
立方体メッシュ(ボクセル化)→焼きなまし法で結合→A*アルゴリズム動かす→立方体のどこを動くか→さらに検索
三次元パス検索。上位層・下位層でデータを分離させてAABB列を通る経路を線形計画法で探索 #PFLab
— むさしん (@musaprg) 2017年3月28日
戦略位置検出システム
自分の能力に合わせてポジショニングするシステム Point Query System
「これをゲームデザイナが作れるようなツールを開発」 #pflab
— κeen (@blackenedgold) 2017年3月28日
まあ大規模になるといかにプログラマーが頑張らないようにするかということが大事になるから、ツール作るのは大事だよね #pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
ステアリング
衝突回避
行きたい方向の空間の空きを見る
相互回避
移動モーション解析
- 止まるときに現在の速度で停止までにかかる時間
- 旋回性能
よなよなモンスターが頑張ってる
夜な夜な自分の攻撃が当たる範囲を分析しつづけるベヒーモス #PFLab
— NaOHaq(仮性ソーダ) (@NaOHaq) 2017年3月28日
急に止まれないので旋回性能などをシミュレーションで計測する
— κeen (@blackenedgold) 2017年3月28日
#pflab
夜な夜な学習するキャラたち#pflab
— sksat@山行終わり (@sksat_tty) 2017年3月28日
夜な夜な学習する健気なキャラたち #PFLab
— むさしん (@musaprg) 2017年3月28日
くるまは
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
きゅうには
とまれない
#pflab
アンビエントAI
街にいる群衆を作る
ハイタッチの場所合わせのAI #pflab
— κeen (@blackenedgold) 2017年3月28日
自分のキャラクターを放置してもある程度勝手に動いてぼっちを防ぐAI
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
#pflab
オブジェクト側に知能を持たせる
群衆AI:オブジェクト側に知性を持たせる(椅子とか) #PFLab
— むさしん (@musaprg) 2017年3月28日
キャラクターが近くに行くとキャラクターが操られる
— sksat@山行終わり (@sksat_tty) 2017年3月28日
モノが情報を発信する世界、ユビキタス社会なのでは? #pflab
— κeen (@blackenedgold) 2017年3月28日
オブジェクト: 情報発信
椅子「ねぇねぇ、君ら自分で動いていると思った?自発意思があると思った?残念でした~、私が君らを操ってるんだよ」
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
NPC「・・・(ぐぬぬ」
って感じか。#PFLAB https://t.co/QP1J6KaSEw
補足しておくと、オブジェクトが情報を発信することでNPCを「誘導」してはいるけど、最終的にはNPCがその誘導を選択している
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
・・・はず、理解が間違っていなければ。#PFLAB https://t.co/N2IcOsoo8z
【会誌発行】人工知能学会誌 Vol. 32 No. 2 (2017/03) – 人工知能学会 (The Japanese Society for Artificial Intelligence) 表紙解説「ファイナルファンタジーXV」
こないだの #PFLab フォーラムで、スクエニのAI作ってる三宅さんが、「壁とかがあると武器(弓とか槍とか)を使う動きが破綻するのでかなり保守的な動きにせざるを得ない」って話してて、「狭い場所での戦闘だとニンジャ最強」という思いを新たにした。
— NaOHaq(仮性ソーダ) (@NaOHaq) 2017年4月4日
XamarinとMicrosoft Azure
Microsoft社の松屋宣伝担当・・・じゃなかった、テクニカルエバンジェリスト兼マンガ家の千代田まどか(ちょまど)さんの発表です。
特にメモ取る内容ではなかったというかツイート実況してたので以下ツイートまとめ。
ちょまどさんに実際に会うのはこれが初めてでしたが、某友人から「こいつはだめだ」みたいな話を聞いていたのでぶっちゃけそこまで期待してなんていなかったんだからねっ!(ツンデレ
内容的には blogs.msdn.microsoft.com に近い感じ。
わーい、ちょまどさんの講演が始まります。^_^ #pflab
— ぜーた (@zetaplusplus) 2017年3月28日
ちょまどさんのダイマによってXamarin最近いじり始めたのもあるからかなり楽しみ #PFLab
— むさしん (@musaprg) 2017年3月28日
はじめての生ちょまどさん。 #pflab プレゼンうまいって聞くし、学べるところありそうだなー。
— あかみ (@akami_orihime) 2017年3月28日
「大学1、2年や高校生も来てるのでプログラミングチュートリアル的な講演をしてもらいます」 #pflab
— κeen (@blackenedgold) 2017年3月28日
さて、ちょまどさん (@chomado ) のXamarinの発表が始まった。#pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
??「この講演を聞くとだれでもプログラミングできるようになる」
「ゆるいイベントと思ってノリノリってきたらアカデミックで申し訳ないです」 #pflab
— κeen (@blackenedgold) 2017年3月28日
「すごいアカデミックな感じで非常に恐縮です」 大丈夫そこまでじゃない #PFLab
— NaOHaq(仮性ソーダ) (@NaOHaq) 2017年3月28日
AIの話は一切出てきません。モバイルアプリ開発の話です。ゆるふわ枠です。 #PFLab
— shunsuke_sasaki (@shunsuke_sasaki) 2017年3月28日
AIの話は出ません(キリッ
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
ゆるふわ枠です(キリッ
#pflab
な、なるほど?(わかっていない顔モバイルアプリ開発って言うけど、AzureもGPUインスタンス持ってるから、ある意味でAIの発表たりうるんだよなぁ。Visual Studioでクライアント側のC#は当然書けるし、Python書けるからChainerとかの実装できるし。 #pflab
— あかみ (@akami_orihime) 2017年3月28日
「エンジニア兼マンガ家です」エンジニアなの? #pflab
— κeen (@blackenedgold) 2017年3月28日
自己紹介なうです。 #pflab pic.twitter.com/fX4RtCrUi7
— ぜーた (@zetaplusplus) 2017年3月28日
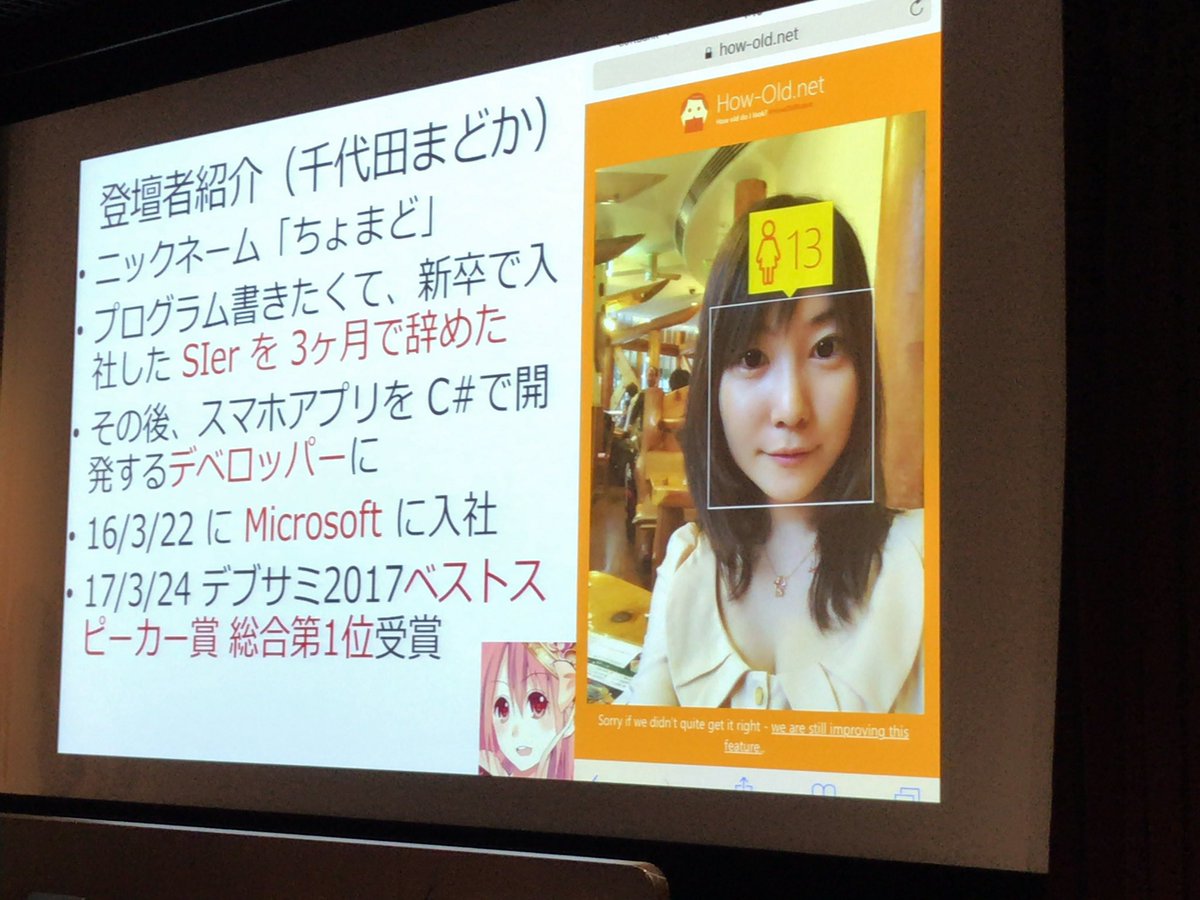
自己紹介に6分くらい使ったぞ #pflab
— κeen (@blackenedgold) 2017年3月28日
ゴールです。 #pflab pic.twitter.com/ny3bJEDsOX
— ぜーた (@zetaplusplus) 2017年3月28日

C#とは
— むさしん (@musaprg) 2017年3月28日
Cが互換性を保ちながら暗黒の進化を遂げたものがC++ #PFLab
— むさしん (@musaprg) 2017年3月28日
暗黒の進化笑う。しかもその説明があながち間違っていないからあれだ。
C#よりF#の方が身近な人が多い学科にいると思っている #PFLab
— Masaki Waga (@MasWag) 2017年3月28日
私はF#知らない勢なのでfmfmという感じ
Lisperです #pflab
— κeen (@blackenedgold) 2017年3月28日
c#の由来なうです。 #pflab pic.twitter.com/anWC9DCrTw
— ぜーた (@zetaplusplus) 2017年3月28日
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
「C#は型が強い言語で」なんか刺されそうな発言だ #pflab
— κeen (@blackenedgold) 2017年3月28日
おまえらdynamicあるやん、という思い
PHPerです #PFLab
— むさしん (@musaprg) 2017年3月28日
— Masaki Waga (@MasWag) 2017年3月28日
async/awaitなー #pflab
— κeen (@blackenedgold) 2017年3月28日
ここでコンソールアプリケーションの説明で「コマンドプロンプト」という名前をど忘れしたちょまど氏。
コマンドプロンプトという名前をど忘れしてしまった @chomado 氏 #pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
Microsoft社員、「コマンドプロンプト」を忘れる#pflab
— sksat@山行終わり (@sksat_tty) 2017年3月28日
C#をどんな言語かを見せるためにライブコーディングが始まりました。
REST APIを叩いてコンソールに吐くアプリケーションのライブコーディング #pflab
— κeen (@blackenedgold) 2017年3月28日
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
REST API叩けばAsync/Awaitとかも見せられるから題材としては適当だよね。
Asyncって「えいしんく」なのか「あしんく」なのか
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
個人的には後者で読んでるけど
#pflab
@yumetodo っeɪsíŋkrənəs
— ドブ色のナンシー (@Ramen_gh510) 2017年3月28日
www.infoq.com@chomado 「HTTP Clientを使う」
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
でた、usingしてはいけない罠だ
#pflab
C++もC++17でAsync/Awaitが来るはずだったのになぜか入らなかったのを思い出した。辛い。
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
async/awaitがないとは人権がない
#pflab
本の虫: C++標準化委員会の文書のレビュー: P0022R1-P0092R1
[PDF] P0057R1: Wording for Coroutines
コルーチンの文面案。変更点は、とうとうキーワードが決定されたこと。co_await, co_yield, co_returnになった。なんだか泥臭い名前だ。しかし、await, yieldなど使えるわけがない。
future<void> g() { std::cout << "processing f" << std::endl ; co_await f() ; std::cout << "resumed" << std::endl ; }
うーむ。バイク小屋バイク小屋。
NuGetの紹介 #pflab
— κeen (@blackenedgold) 2017年3月28日
dynamicがあるC#は型が強くないのではないか(C++er並感) #pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
asynchronous の語頭の a を弱母音で読むか強母音で読むかは地域によって違う気がする #PFLab
— NaOHaq(仮性ソーダ) (@NaOHaq) 2017年3月28日
「無理矢理入れたデモでした」 #pflab
— κeen (@blackenedgold) 2017年3月28日
最終デモなうです。 #pflab pic.twitter.com/QVXTwJnCgZ
— ぜーた (@zetaplusplus) 2017年3月28日
ちょっとここまでの講演に圧倒されて危機感を覚えたちょまどさんが慌てて追加した内容っぽい。
C#ってMicrosoftのオレオレ言語じゃないの?
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
むかしはそうだった。
#pflab
Linuxで動く(ちゃんとしたAPIがあるとは言ってない) #pflab
— κeen (@blackenedgold) 2017年3月28日
— むさしん (@musaprg) 2017年3月28日
— ゆき (@blessingyuki) 2017年3月28日
30億のデバイスで動いて客先で動かないJava #pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
30億のデバイスで動く(30億のデバイスで動くとは言っていない)#pflab
— sksat@山行終わり (@sksat_tty) 2017年3月28日
VS for MacがきたからC#が勢力拡大してきてる感やばい #PFLab
— むさしん (@musaprg) 2017年3月28日
動作環境説明なうです。 #pflab pic.twitter.com/N1JNx1Uq2x
— ぜーた (@zetaplusplus) 2017年3月28日
完全版じゃなくてプロプライエタリね。.NET Framework #pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
HoloLensほしい #PFLab
— むさしん (@musaprg) 2017年3月28日
プラットホームの説明なうです。 #pflab pic.twitter.com/kiLGiCyrKo
— ぜーた (@zetaplusplus) 2017年3月28日
MRってARより古い呼称らしいですね。 #pflab
— κeen (@blackenedgold) 2017年3月28日
MRのほうがVRより古いって本当か?
Virtual reality - Wikipedia Mixed reality - Wikipedia
見ている感じそういう印象は受けないが・・・。
Xamarinのお話
「Windows Phoneアプリが作れます」ところで実機は #pflab
— κeen (@blackenedgold) 2017年3月28日
やっぱりXamarinは強いよなぁ、バグが無ければ #pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
ここで私の友人がXamarinのバグと戦った話を紹介しておきましょう。
Xamarin.Forms または私は如何にして心配するのをやめてバグを愛するようになったか — 173210's Blog
— むさしん (@musaprg) 2017年3月28日
「Xamarineを使えばモバイルアプリも作れます」 #pflab
— κeen (@blackenedgold) 2017年3月28日
なおビルドは #PFLAB https://t.co/TtZk0f496S
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
Xamarinとは
- 海
- 神奈川県座間市のマスコットキャラクター
- 開発環境
「みなさん優秀ではない」 #pflab
— κeen (@blackenedgold) 2017年3月28日
「本当に座間市にザマリンってキャラクター居るんですよ」 #pflab
— κeen (@blackenedgold) 2017年3月28日
すごいtypoした。「みなさん優秀ですね」の間違い。https://t.co/ESkSjIoiUB
— κeen (@blackenedgold) 2017年3月28日
#pflab
名 前 空 間 の 汚 染 #PFLab
— ゆき (@blessingyuki) 2017年3月28日
ちょまど「名前空間の汚染が激しい」
xamarin愛が始まりました。 #pflab pic.twitter.com/MGJ6oDSayJ
— ぜーた (@zetaplusplus) 2017年3月28日
Xamarineと書いた僕は社会的地位を失ってしまった #PFLab
— むさしん (@musaprg) 2017年3月28日

どちらが「汚染」したのかについては議論が分かれるところである #PFLab
— NaOHaq(仮性ソーダ) (@NaOHaq) 2017年3月28日
Xamarinの公式キャラクターになってしまったざまりん氏 #PFLab
— むさしん (@musaprg) 2017年3月28日
そろそろ、座間に怒られそう#pflab
— botisle (@hi86074659) 2017年3月28日
C# で開発できるプラットフォーム、Unityのおかげで「主要なゲームプラットフォームほとんど全て」もあるよ… #pflab
— よだ (@n__yoda) 2017年3月28日
XCodeはMacでしか動かないIDEです(煽り
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
なおVisual Studio for Macは・・・
#pflab
xamarinとは、なうです。 #pflab pic.twitter.com/pXocBcCpyr
— ぜーた (@zetaplusplus) 2017年3月28日
ビジネスロジックが共通化できるのはいいんだけどUIのコードってむしろプラットフォーム毎にカスタマイズしたくないの? #pflab
— κeen (@blackenedgold) 2017年3月28日
コード共通化率6割~9割 #pflab
— κeen (@blackenedgold) 2017年3月28日
xamarinのコード共通化率なうです。 #pflab pic.twitter.com/vbigO4Tilc
— ぜーた (@zetaplusplus) 2017年3月28日
「WindowsとMacで開発出来ます」Linuxは……………… #pflab
— κeen (@blackenedgold) 2017年3月28日
Xamarinではnative UI/APIを100%利用可能、パフォーマンスもnative appsと同じ #pflab
— こば(就活をやる) (@kobae964) 2017年3月28日
VIsual Studio for Linuxはよ #PFLAB https://t.co/Ww1iMjUFIc
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
ターゲットプラットフォーム毎に値段取られてたのな < Xamarin #PFLab
— NaOHaq(仮性ソーダ) (@NaOHaq) 2017年3月28日
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
xamarinまとめなうです。 #pflab pic.twitter.com/QNopLHXjAg
— ぜーた (@zetaplusplus) 2017年3月28日
Visual Studio 2017
VS2008懐かしい… #PFLab
— むさしん (@musaprg) 2017年3月28日
Visual Studioが20周年 #pflab
— κeen (@blackenedgold) 2017年3月28日
vs2017まとめなうです。 #pflab pic.twitter.com/YEDrzVHR1P
— ぜーた (@zetaplusplus) 2017年3月28日
Azure
内容的には
のお話。
Azure、あずれと読んでいた情弱が通ります #pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
@yumetodo アズレじゃない!?
— YSR (@YSRKEN) 2017年3月28日
@YSRKEN @yumetodo 強いて言うなら「アヂュァ」みたいな感じ。なお日本で一般的なのは「あじゅーる」
— 白山風露 (@kazatsuyu) 2017年3月28日
@kazatsuyu @YSRKEN @yumetodo そうですね、アメリカの本社の人たちなどは皆んな「アヂュァ」ですね
— ちょまど@devサミベストスピーカー受賞 (@chomado) 2017年3月28日
Azureさん、RDBMSがSQL Serverだけじゃ誰も使わんのでPostgreSQL用意してくれませんかね……… #pflab
— κeen (@blackenedgold) 2017年3月28日
Clientはマルチプラットフォームが当たり前(煽り #pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
MBaaS
azureの話しなうです。 #pflab pic.twitter.com/jvY5Zjcqjf
— ぜーた (@zetaplusplus) 2017年3月28日
ここでプロジェクターが唐突に死亡する事件発生
唐突にプロジェクターが死んだ #pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
突然登壇者のMacBook Proが死んだがもう終わる #PFLab
— Masaki Waga (@MasWag) 2017年3月28日
ちょま「何時まででしたっけ?」主催「…特に。」(※本当は17:20) #pflab
— よだ (@n__yoda) 2017年3月28日
「公約を掲げます、あと10分で絶対終わります」
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
フラグかな?
#pflab
Azureのアクティベーションコードがただでくれるっぽい、学生なら。
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
来週実際に @chomado さん講師でコーディングも先着20名であるっぽい
#pflab
講演中にパソコン死んだ…ショック…orz 本当すみません、、 #pflab
— ちょまど@devサミベストスピーカー受賞 (@chomado) 2017年3月28日
発表終了!懇親会 #pflab
— yumetodo-C++erだけど化学科 (@yumetodo) 2017年3月28日
終了
自動運転(機械学習)はこれまでの研究生活で勉強してた事に関係してるし、ゲームAIはこれから働く会社でやっていきそうな事だし、そしてC#も研究室の公用語かつこれからのゲーム開発で使っていく言語だったりで、自分の人生とのシンクロ率が高いイベントだった。#PFLab
— NORICCHIONE のりッチョーネ (@yusukeinyos_max) 2017年3月28日
講演中に MacBook が死にました、
— ちょまど@devサミベストスピーカー受賞 (@chomado) 2017年3月28日
後半の一番メインの Azure デモが skip になって
正直ショック過ぎてその後の懇親会、頭が半分くらい死んでました、すみません… #pflab
ちょまどさんのプレゼンでざまりんって言うゆるキャラがいることしか新たな知見が得られなかったw #pflab
— 酸欠少女鮭吉 (@syakekichi) 2017年3月28日
東大の加藤先生にお呼ばれし、
— ちょまど@devサミベストスピーカー受賞 (@chomado) 2017年3月28日
今日は東大で講演をさせていただきました!
素晴らしい経験をありがとうございました!#PFLAB pic.twitter.com/Is3clKptie
@meitel1014 (阪大勢) @blessingyukiとお話しつつ、ケンタッキーのチキンとミスドのなんかを食べつつして、その後3人で御茶ノ水まで歩いて各々帰りました。
感想
ちょまどさんのいいようではないけど、思ってたよりアカデミックな感じでびっくりした。
Deep Learningの話は予備知識がたりなさすぎて???ってなってたけど、3Dマッピングのあたりはなんとなく理解できた。
ゲームAIの話は、AIを考えるのはデザイナーの仕事なんだな、というのに驚いた。まあ結果AIを書くためのツールを作ったという話があったけど、そのツールそのものがかなりの価値があるんじゃないか、という思いだった。
ちょまどさんの発表は・・・、まあせっかくAzureの試用ライセンスもらったので使ってみようかなと思っています。